Abstract
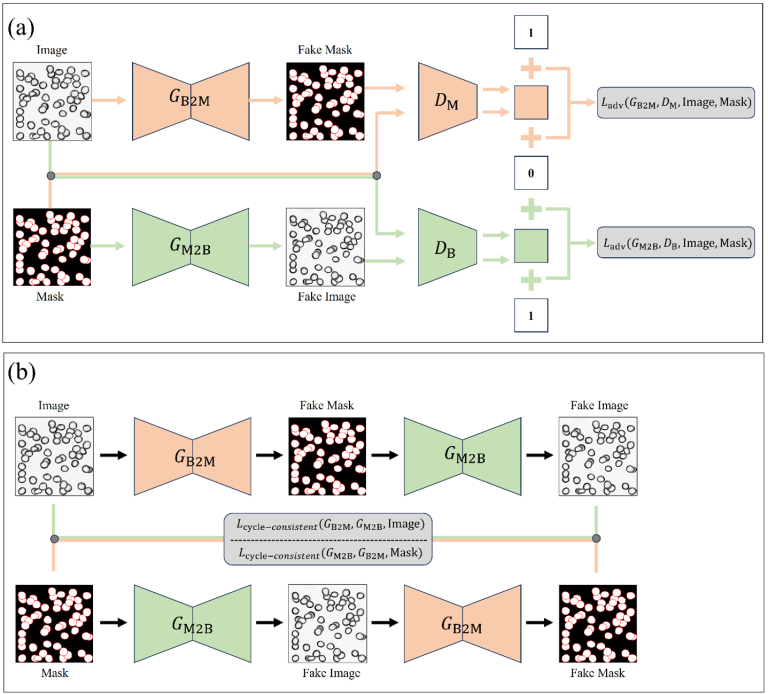
The application of machine learning techniques has significantly advanced particle and bubble detection and segmentation in fluid mechanics. However, most existing deep-learning-based segmentation methods rely on large amounts of high-quality pixel-level annotations, which are costly and time-consuming to obtain, especially for complex bubbly flows. In this work, we propose a fully unsupervised bubble segmentation framework based on Cycle-Consistent Generative Adversarial Networks (CycleGAN), which learns a direct mapping from bubble images to segmentation masks using unpaired training data. Specifically, the model is trained on two independent sets consisting of experimental or synthetic bubbly flow images and corresponding bubble masks generated from the BubGAN dataset, without requiring any paired image–mask annotations. By enforcing cycle consistency and adversarial constraints, the proposed Bubble CycleGAN effectively captures the geometric characteristics of bubbles and produces accurate segmentation masks from input images, even under varying experimental conditions. The performance of the method is evaluated using both BubGAN data and labeled experimental datasets. The proposed approach substantially reduces the need for manual labeling and provides a practical solution for large-scale bubble segmentation. Furthermore, the framework is not limited to bubbly flows and can be readily extended to other particle-laden flow systems.