Abstract
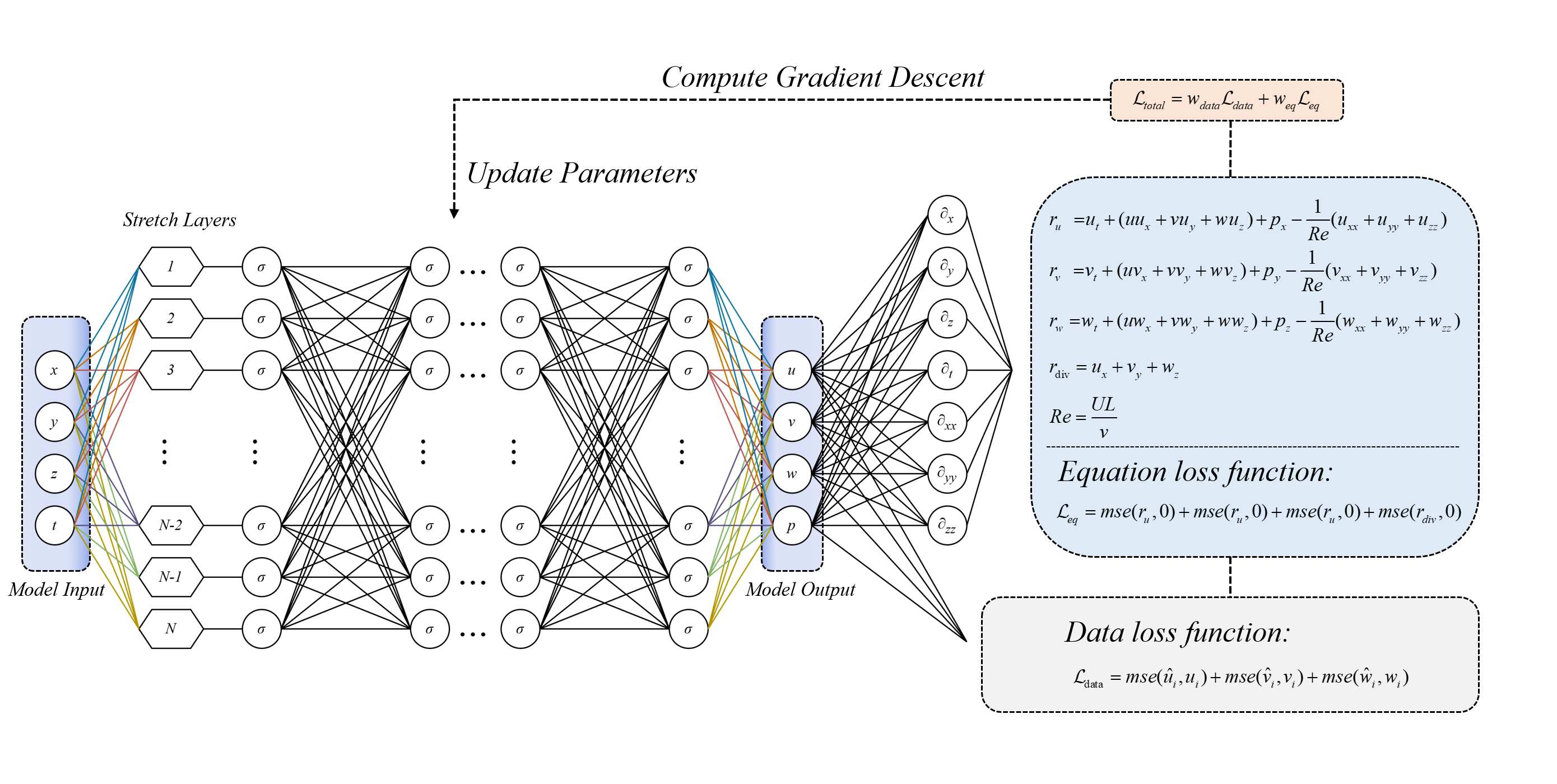
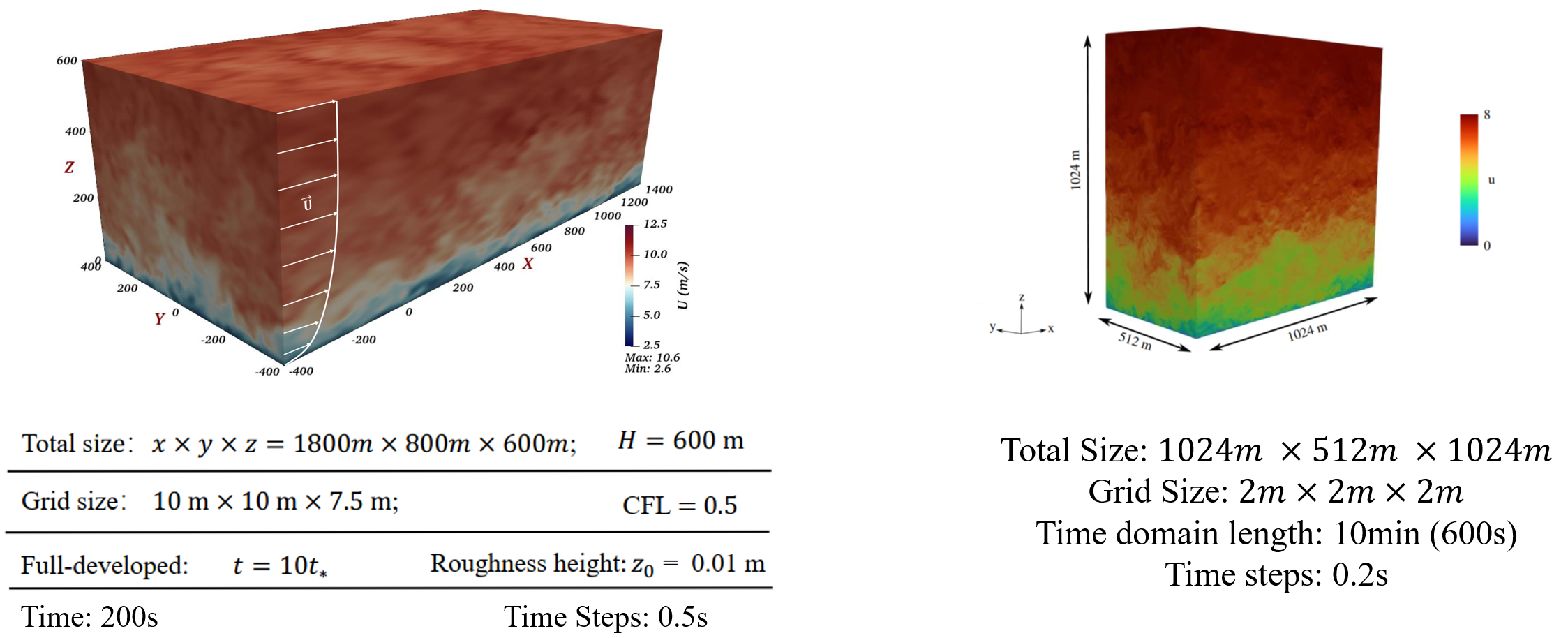
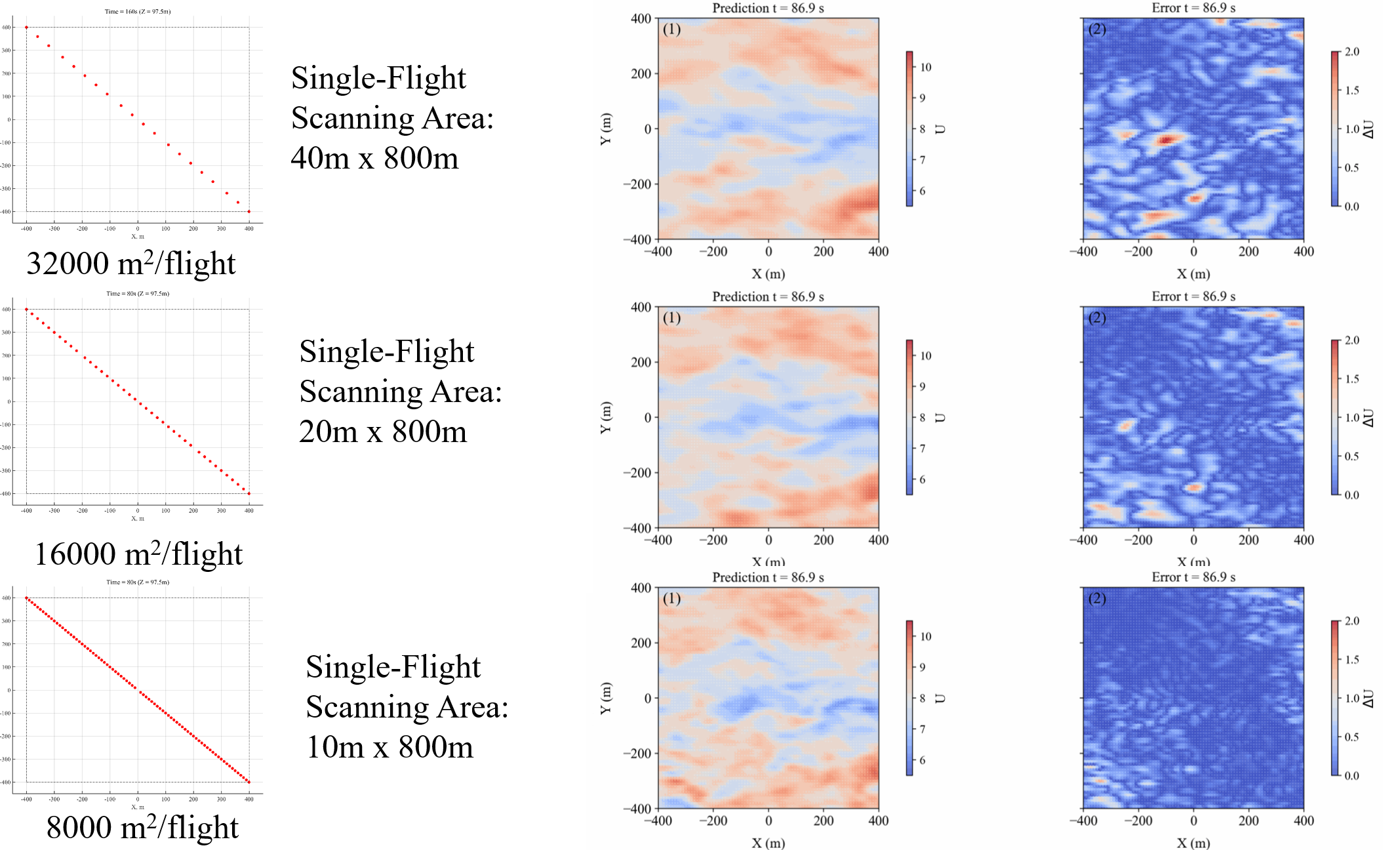
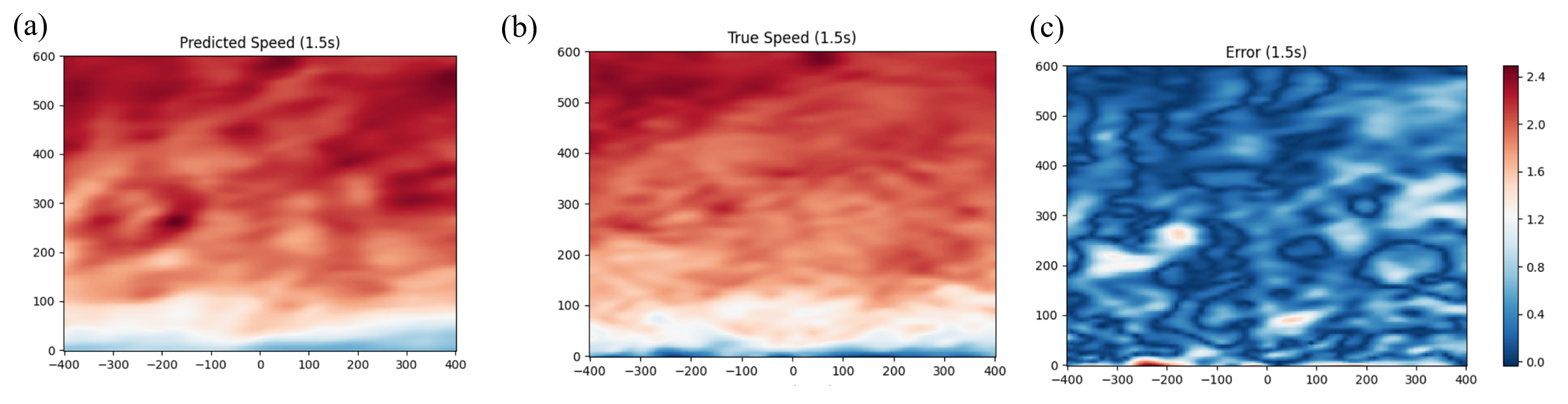
Characterizing turbine-scale atmospheric boundary layer (ABL) flows is a critical part of the wind power industry. Current flow characterization methods around wind turbines have clear drawbacks, and that is why we need a more flexible, economical, and deployable platform for wind field characterization. To achieve this goal, we utilize Unmanned Aerial Vehicle (UAV) platforms as a new solution platform. Through the Physics Informed Neural Network (PINN), we can reconstruct wind fields using a small amount of collected data. PINN tightly couples data and physics by embedding the governing Navier–Stokes equation and continuity residuals into the learning objective via automatic differentiation, allowing the network to infer unmeasured states and unknown parameters while enforcing equation consistency even where data are sparse. Here, we apply a method validation using synthetic UAV measurements drawn from Large-Eddy Simulation (LES) datasets. By providing mobile, in-situ sampling that captures 3D wind structure and assimilating it within a physics-informed model, this UAV-enabled framework aims to deliver accurate, uncertainty-aware 4D reconstructions that directly support turbine-level decision-making for higher efficiency and safer operations.